#include <unit.h>
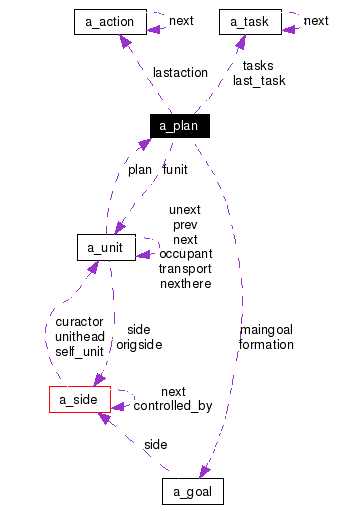
Collaboration diagram for a_plan:
Public Attributes | |
| PlanType | type |
| short | creation_turn |
| short | initial_turn |
| short | final_turn |
| short | asleep |
| short | reserve |
| short | delayed |
| short | waitingfortasks |
| short | aicontrol |
| short | supply_alarm |
| short | supply_is_low |
| short | waitingfortransport |
| a_goal * | maingoal |
| a_goal * | formation |
| a_task * | tasks |
| a_unit * | funit |
| Action | lastaction |
| short | lastresult |
| Task | last_task |
| TaskOutcome | last_task_outcome |
| short | execs_this_turn |
|
|
true if an AI can operate on the unit |
|
|
true if the unit is doing nothing |
|
|
turn at which this plan was created |
|
|
true if plan delayed. ??? |
|
|
Excutes this turn if true. |
|
|
turn to deactivate this plan |
|
|
the main goal of this plan |
|
|
pointer to chain of sequential tasks |
|
|
turn at which this plan is to be done |
|
|
that action's outcome |
|
|
a copy of the last task executed |
|
|
pointer to unit keeping formation |
|
|
a copy of the last action attempted |
|
|
|
|
|
true if unit waiting until next turn |
|
|
|
|
|
true if supply alarm is needed. |
|
|
goal to keep in a formation |
|
|
general type of plan that we've got here |
|
|
true if waiting to be given a task |
|
|
true if waiting for transport. |
 1.3.6
1.3.6